

سیستم تعلیق طبق دار دوبل چیست ؟
سیستم تعلیق طبق دار دوبل(A-Arm or Double Wishbone )
تکامل بعدی در سیستم های تعلیق طراحی سیستم جناغی یا Double Wishbones بود که در آن دو طَبَق به شکل حرف A ، با طولهایی یکسان و به موازات یکدیگر در بالا و پایین مرکز چرخ قرار می گرفتند .
این سیستم بدلیل وجود دو طَبَق قوی ، کنترل بسیار خوبی را دارا بود اما این سیستم نیز قابلیت تغییر زاویه Camber را دارا نبود . همین اشکال ، باعث طراحی نوع جدید سیستم جناغی گردید . در این نوع برای اینکه سیستم بتواند ، در هنگام فشردگی زاویه منفی ، و در هنگام باز شدن زاویه مثبت پیدا نماید ؛ طَبَق بالا کوتاهتر از طَبَق پایین در نظر گرفته شد ، همین امر باعث شد تا طَبَق پایین حین حرکت شعاع کمتری را پیموده و چرخ

هنگام بالا رفتن دچار زاویه منفی گردد که این امر همانطور که گفته شد از انحراف خودرو در پیچها جلوگیری می نماید این سیستم در اکسل جلوی بسیاری از خودروهای جدید امروزی ، اکثر خودروهای مسابقه ای از جمله فِراری ، اکثر خودروهای کارخانه هوندا و … یافت می شود و تقریبا خالی از هر اشکالی است . این سیستم مستقل ، از فنر لول که کمک فنر نیز درونش واقع شده ، بهره می برد . اما نمی توان برای این شکل قرارگیری فنر و کمک فنر لفظ Strut استفاده نمود ، چرا که فنر و کمک فنر خاصیت ایفای نقش یک لینک را مانند آنچه در Strut وجود دارد ، ایفا نمی کنند . و کاربرد لفظ Strut ، برای این شکل قرارگیری ، فقط در نوع McPherson می باشد

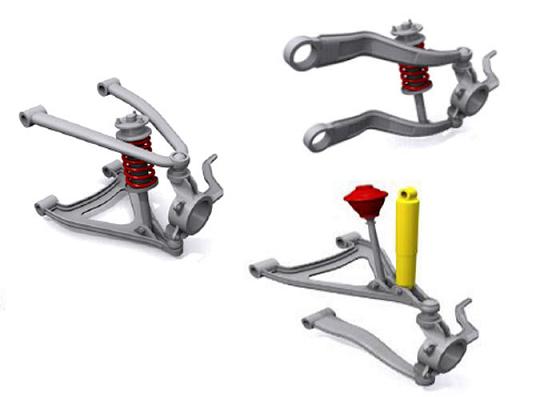
تعلیق طبق دار دوبل دو ویژگی آخر را به راحتی دارا می باشد. این سیستم دارای دو رابط عرضی (بازوی کنترل) در هر طرف خودرو می باشد، که روی قاب یا قاب زیرین تعلیق یا بدنه حرکت چرخشی دارند و در
اکسل جلو از بیرون به شغال دست که باعث فرمان دهی چرخ می شود متصل شده اند. فاصله موثرC بزرگتر بین رابطهای عرضی باعث، نیروهای کمتر در بازوهای کنترلی تعلیق و پایه هایشان می شود.
مزیت مهم تعلیق طبق دار دوبل امکانات سینماتیکی آن می باشد. موقعیت بازوهای کنترل تعلیق نسبت به هم – به عبارت دیگر اندازه زوایای β، α (می تواند ارتفاع مرکز غلتش بدنه و ارتفاع قطب pitch ( قطبی که اجزا نسبت به آن حرکت نوسانی دارند) را تعیین کند (زوایایβ ،α علاوه بر این طولهای متفاوت بازو های کنترل می تواند بر زاویه حرکت چرخ مرتجع و چرخ فشرده، تغییر کمبر و غیر از اینها، بر محدوده ی مطمئن تغییر پهنای track( پهنای بین دو چرخ یک محور) اثربگذارد (). اگر بازوی کنترل بالایی کوتاهتر باشد چرخ فشرده کمبر منفی وچرخ مرتجع کمبر مثبت می گیرد، که تغییر کمبر ایجاد شده توسط pitch غلتشی بدنه را بی اثر می کند

اکسل جلو پشت چرخ و در اکسل عقب جلوی چرخ واقع شده است. اگر می توانست روی مرکز چرخ باشد نه تنها مکانیزم ضد شیرجه(anti dive) را بهتر می کرد، بلکه شیرجه در اکسل عقب متحرک را هم کاهش می داد.( به عبارت دیگر اکسل جلو را بلند می کرد).
اینها دلایل استفاده زیاد از تعلیق طبق دار دوبل به عنوان اکسل عقب بدون در نظر گرفتن نوع محرک در خودروهای سواری می باشد، و دلیل اینکه چرا این سیستم به طور گسترده جایگزین اکسل شبه رابط کشنده شده است.

شکل: اکسل جلو در خودروی باری سبکVW,Lt28-35 با چهار ضلعی (square) فرمان معکوس می باشد. عضو میانی به عنوان قاب زیرین به کار می رود واز زیر به شاسی پیچ شده است. فنرها، ضربه گیرها در این مرکز نیرو ساپورت شده اند؛ میله ضد غلتش، جعبه فرمان، بازوی کنترل پایین به اعضای طولی قاب بسته شده اند.
میله ها دارای یاتاقان های بوشی لاستیکی در جلو می باشند که سختی غلتش دینامیکی تایرهای رادیال را می گیرد.