

پروتکل LIN چیست و چه کاربردی در خودرو دارد ؟
افزایش سیستمهای کنترلی در خودرو و تعامل این سیستمها با یکدیگر سبب ایجاد و افزایش شبکههای مورداستفاده در خودرو شده است. در مقاله پروتکل CAN و سایر پروتکلهای خودرو، برخی از مهمترین پروتکلهای مورد استفاده در خودرو معرفی شدند. یکی از این پروتکلها، پروتکل LIN بود. باتوجهبه کاربرد نسبتاً فراوان این پروتکل در خودروهای امروزی، در این مقاله به بررسی این پروتکل خواهیم پرداخت.
ظهور پروتکل LIN
پروتکل LIN هدف جاهطلبانهای مانند پروتکل CAN نداشت. در واقع آنچه باعث شد این پروتکل رشد کند عدم رقابت با پروتکلهای قوی بود. هدف بسیار ساده تعریف شده بود. پروتکلی ارزانقیمت با کارایی مطلوب که سیستمهای ساده را مدنظر قرار داده بود. این پروتکل برای اولینبار توسط شرکت موتورولا (Motorola) در سال 1999 معرفی شد. قابلیتهای آن سبب شد به سرکت کنسرسیومی از شرکتهای معتبر از جمله شرکتهای خودروسازی مانند کرایسلر، ا او دی، بی ام و، فولکس و ولو تحت هدایت شرکت موتورولا روی این پروتکل سرمایه گزاری و فعالیت کردند. این فعالیت سبب ارایه 1.2 در سال 2000 و 1.3 2002 میلادی شد. انجمن SAE در سال 2003 آن را بهعنوان یکی از استانداردهای مورد پذیرش این مؤسسه با کد استاندارد J2602 قبول و معرفی کردند. امروزه پروتکل LIN 2.0بهعنوان یکی از شبکههای مهم بیشتر خودروسازان معتبر آلمانی مانند بنز و بی ام، فولکس مورداستفاده قرار گرفته است. بهصورت کلی LIN بهعنوان مکمل پروتکل CAN در خودروها در نظر گرفته میشود.
مشخصات پروتکل LIN
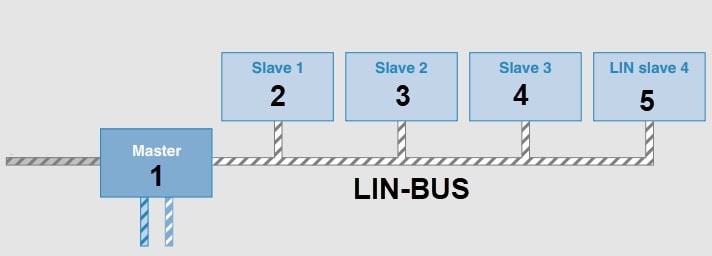
پروتکل LIN برای بین نودهایی که ارتباط بین آنها نیاز بهسرعت بالایی ندارند ارتباط برقرار میکند. سرعت این پروتکل حداکثر تا 20 kbit/s است که این شبکه را در کلاس A دستهبندی SAE قرار میدهد. حداکثر 16 نود میتوان در یک خط شبکه آن قرارداد. شکل 1 نمونهای از نحوه اتصال این پروتکل را نشان میدهد.
1- نود مرکزی 2- نود آینه 3- نود ارتباط با در پارکینگ 4- سنسور نور و باران 5- نود برفپاککن
شکل 1- نمونه شبکه با پروتکل LIN در خودرو
همانطور که در این شکل ملاحظه میشود این پروتکل از نوع Master-Slave است؛ یعنی یک نود مرکزی وجود دارد و سایر نودها به ان نود متصل میشوند. در خودرو تارا نود مرکزی NBCM به نود PAS که یونیت کمک پارک است توسط این پروتکل متصل شده است. نوع ارتباط در شبکه LIN از نوع BUS است. نود مرکزی (Master) علاوه بر مدیریت نودهای موجود در شبکه، ارتباط با سایر پروتکلها را نیز بر عهده دارد؛ بنابراین این نود گذرگاه (Gateway)نیز به شمار میرود. نوع ارتباط آنها از نوع BUS است و از روش تک سیم برای اتصال نودها به یکدیگر استفاده میکنند.
برای اینکه به گستردگی کاربرد LIN در خودرو ها پی ببرید به شکل 2 توجه کنید.
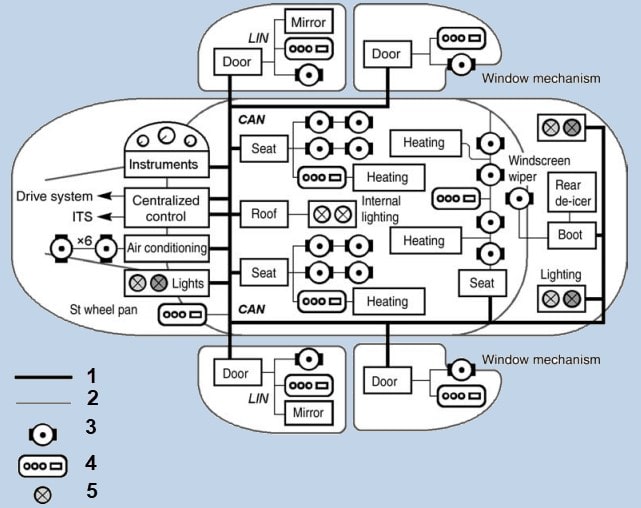
1- CAN bus 2- LIN Bus 3- موتور 4- مجموعه کلید 5- لامپ
شکل 2- کاربرد شبکه LIN در خودرو
همانطور که در شکل 2 ملاحظه میشود خط اصلی بین نودهای مهم توسط CAN متصل شدهاند؛ مثلاً به در ها توجه کنید. کنترل یونیت در ها همه از طریق شبکه CAN به هم وصل شدهاند؛ اما تجهیزات قرار گرفته روی در مانند موتور شیشهبالابر، کلید شیشهبالابر و آینه جانبی و مجموعه آینه جانبی که شامل موتورها و گرمکن است از طریق شبکه LIN به هم متصل شدهاند. (شکل 3)
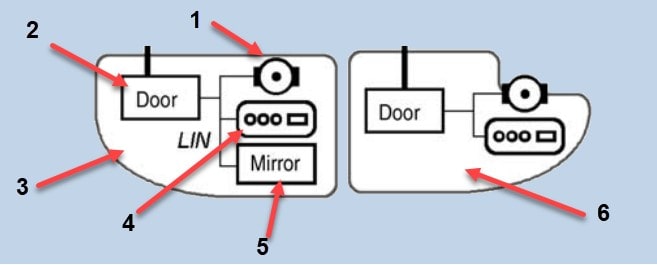
1- موتور شیشه بالابر 2- نود در جلو 3- در جلو
4- کلید شیشهبالابر و آینه 5- آینه جانبی 6-در عقب
شکل 3- شبکه LIN روی درهای جلو و عقب یک سمت
همین حالت را میتواند در مورد یونیت صندلیها، یونیت تهویهمطبوع یا برفپاککن نیز بیان کرد.
منحنی ولتاژ در شبکه
همانطور که در مقاله اصطلاحات کاربردی در شبکه بیان شد. ارتباط شبکه از نوع دیجیتال است که آن را بهصورت یک ساختار باینری (یعنی صفر و یک) میشناسیم. اما برای اینکه این صفر و یکها که در مجموع یک پیام را منتقل میکنند بتوانیم (معمولاً از یک سیم عبور دهیم) آن را به فرم دیگری تبدیل کنیم. به عبارت سادهتر صفر و یک را نمیتوان داخل یک سیم ریخت و انتظار داشت از آن سیم عبور کند؛ بنابراین عموماً از روش ولتاژی برای این کار استفاده میشود. پروتکل تعیین میکند برای مفهوم صفر و یک چه ولتاژی از سیم عبور کند. شکل 4 منحنی ولتاژ استاندارد در شبکه LIN است.
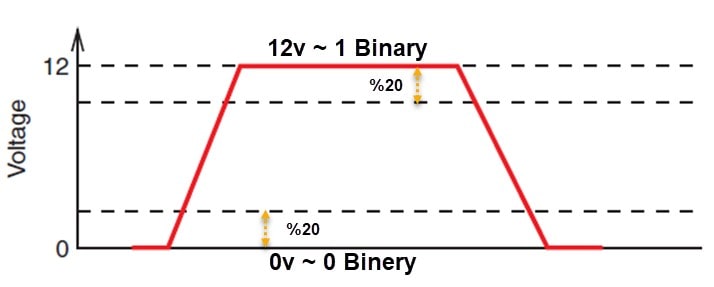
شکل 4- منحنی استاندارد در پروتکل LIN
بر اساس شکل 4، زمانی که ولتاژ در سیم در محدوده 12 ولت باشد معادل کد 1 باینری و زمانی که ولتاژ در سیم در محدوده صفر ولت باشد معادل کد صفر باینری خواهد بود. برای کنترل تغییرات ناخواسته محدوده 20% تغییرات قابلقبول در نظر گرفته خواهد شد. به این معنی که اگر ولتاژ در سیم 10 ولت باشد نیز معادل کد باینری 1 در نظر گرفته خواهد شد. باتوجهبه فرم ذوزنقهای بیتها زمان هر بیت بین 1 الی 3 میکروثانیه (1~3 µS) در نظر گرفته میشود.
فرم پیام درپروتکل LIN
همانطور که در مقاله ساختار پیام در CAN اشاره شد هر پیام باید حداقل شامل مفاهیم مانند موضوع پیام، مفهوم پیام و بازخورد پیام باشد. پیام در LIN هم با اینکه پروتکل ساده است نمیتواند از این امر مستثنی باشد. شکل 5 نمونه فرم پیام در پروتکل LIN را نشان میدهد.
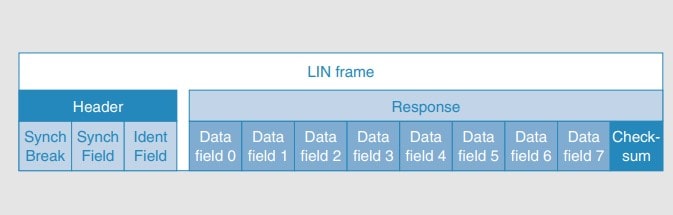
شکل 5- فرم پیام در پروتکل LIN
بر اساس شکل 5 پیام از دو بخش سر تیتر (Header) و واکنش (Response) تشکیل شده است خود این دو بخش از زیربخشهای مختلفی تشکیل شده است. ابتدا برای هماهنگسازی بین نود Master و نود Slave شروع همگامسازی بین آنها در ابتدای هر پیام ایجاد میشود (Break) برای تکمیل همگامسازی، نود Master یک کد اختصاصی ارسال میکند در نتیجه تمامی Slave میتوانند خودرو را به Master همگام کنند(Synch). در ادامه در بخش مشخصات (Ident) موضوع پیام مشخص میشود. در بخش دوم (Response) مفهوم پیام یا پیامها در چند بیت ارسال میشود و در نهایت در بخش (Check sum) بخش کنترلی یا همان صحت سنجی پیام ارسال خواهد شد. امروزه شبکه عضو لاینفک کنترلی در خودرو ها هستند. دانش و اطلاعات مرتبط با شبکه شما را با تکنولوژی روز در این زمینه آشنا خواهد کرد. سلسله مقالات ایمگ در حوزه مالتی پلکس راهی برای ورود به این دنیا خواهد بود.